Contents
- 4-motor drivetrain initialization
- Move Base Function
- 2 controller initialization
- Control Motor Via Controller Axsis
- Check Button Pressed
4-motor drivetrain initialization
The following example is how to initalise motors for a 4 motor drivetrain
vex::motor LF = vex::motor(PORT1, gearSetting::ratio18_1, true);
vex::motor LB = vex::motor(PORT2, gearSetting::ratio18_1, true);
vex::motor RF = vex::motor(PORT3, gearSetting::ratio18_1, true);
vex::motor RB = vex::motor(PORT4, gearSetting::ratio18_1, true);
The last argument in the functions may vary based on how the robot is built
2-controller-initialization
The following is the default method to initialise Horizontal and Vertical (Primary and Secondary) controllers.
vex::controller H = vex::controller(primary);
vex::controller V = vex::controller(partner);
Move Base Function
The following example is a function that will make the robot move based on a specified speed and duration.
void moveBase(int speed, int duration)
{
LF.spin(directionType::fwd, speed, velocityUnits::pct);
LB.spin(directionType::fwd, speed, velocityUnits::pct);
RF.spin(directionType::fwd, speed, velocityUnits::pct);
RB.spin(directionType::fwd, speed, velocityUnits::pct);
task::sleep(duration);
LF.stop();
LB.stop();
RF.stop();
RB.stop();
}
To run the function, just call it in the main() as shown below
int main()
{
moveBase(100, 500);
}
take note that task::sleep(duration) is in milliseconds so…
1 second = 1000 milliseconds
Control Motor Via Controller Axsis
The following code is usually put in the main() function during user-control period
LF.spin(directionType::fwd, H.Axis3.value(), velocityUnits::pct);
LB.spin(directionType::fwd, H.Axis3.value(), velocityUnits::pct);
RF.spin(directionType::fwd, H.Axis2.value(), velocityUnits::pct);
RB.spin(directionType::fwd, H.Axis2.value(), velocityUnits::pct);
The image below is for reference
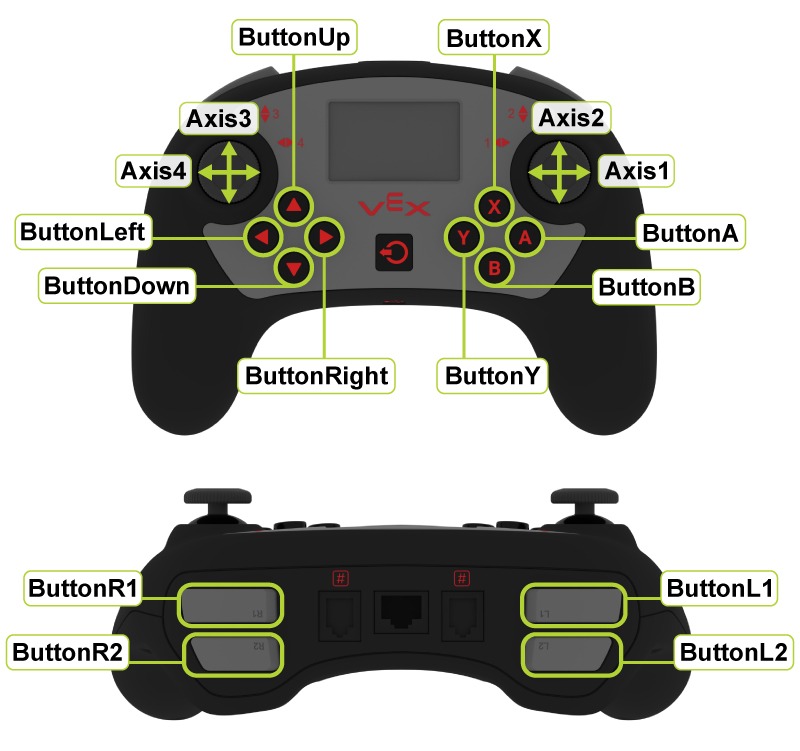 Image source:Holonomic drive train code - VEX Robotics Competition Discussion / VRC > Change Up (20/21) - VEX Forum
Image source:Holonomic drive train code - VEX Robotics Competition Discussion / VRC > Change Up (20/21) - VEX Forum
Check Button Pressed
The following code moves an arm motor when L1 or L2 is pressed.
It is usually placed in the main() function.
if (V.ButtonL1.pressing)
{
arm.spin(directionType::fwd, 100, velocityUnits::pct);
}
else
{
arm.stop();
// alternatively you could do the following
arm.spin(directionType::fwd, 0, velocityUnits::pct);
}